Timing Method for Assessing Detection of Vehicles (TMAD)
Answers the question:
"Can I see/hear vehicles far enough away to be certain that
it is clear to cross whenever it is quiet and/or I see nothing coming?"
Answers the question:
"Can I see/hear vehicles far enough away to be certain that
it is clear to cross whenever it is quiet and/or I see nothing coming?"
-
This timing method of assessment, the TMAD, is used as tool in the Procedure to Develop Judgment of the Detection of Traffic.
This is because it provides feedback for students who are learning to recognize when they cannot hear / see the vehicles far enough away to know when it's clear to cross.
The TMAD also is helpful for teaching them about the effect of masking sounds on their ability to hear the cars.
1. DETERMINE CROSSING TIME:


 Determine the time needed for the crossing either by
Determine the time needed for the crossing either by-- an estimation based on walking speed and the length of the crosswalk / width of the street, or
-- timing several crossings of the street (or an equivalent length) and using the longest time (do not use the average time, since you are looking for the worst-case scenario). Click here for an example of using an equivalent length measured in a parking lot rather than the crosswalk to time the crossing.
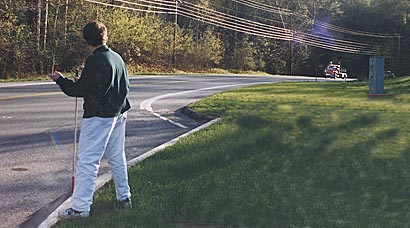
- While standing at the curb, wait until you can hear or see no approaching vehicles (a perceived lull in traffic).
If you are using hearing, this should be at a time when you think it is quiet enough to hear approaching traffic sufficiently.
There should be no extraneous noises that would mask the sound of the approaching vehicles.

 3. TIME DETECTION-TO-ARRIVAL OF VEHICLE:
3. TIME DETECTION-TO-ARRIVAL OF VEHICLE:
- Start a stopwatch when you hear or see something that might be an approaching vehicle (do not wait until you are sure it is a vehicle, start the stopwatch when you first suspect there might be a vehicle).
Stop the watch when the approaching vehicle passes in front of you.
4. COMPARE:
Compare the vehicle's detection-to-arrival time with the time you need to cross. If the time recorded for a vehicle's detection-to-arrival is...
- less than your crossing time, then unless it slowed down, that vehicle would have reached you before you finished your crossing if you had started to cross just before you heard or saw it.
- more than your crossing time, you would have completed the crossing before that vehicle reached you, even if you had started just before it was detected.
5. REPEAT!
Follow steps 2-4 to continue timing and comparing the detection of approaching vehicles until either:
- a vehicle reaches you in less time than you need to cross even though
- you started the timer the instant you first heard or saw anything that might possibly be a vehicle, and
- you were using you hearing / vision as efficiently as possible
- you are confident that you timed your detection of one of the worst cars.
6. DRAW YOUR CONCLUSION:
- If a vehicle reached you in less time than you need to cross even though you were using your hearing or vision as efficiently as possible and you started the timer the instant you first heard or saw anything that might possibly be a vehicle, there is no need to continue timing detection of vehicles.
You now know that in those conditions, you are in a situation of uncertainty for gap judgment because you cannot detect all the vehicles far enough to know whether or not it is clear to cross.
You should be aware that in those conditions, if you start to cross when it seems clear (that is, you can hear or see no approaching traffic), there might be a vehicle coming that could reach you before you finish your crossing, and you are depending on the driver to see and avoid you.
NOTE: Perhaps it was not really quiet when you heard the car. In that case, you learned that in that condition (that is, whenever it is not really quiet), you can't hear all the cars far enough to know whether it is clear to cross. To find out if you can hear them well enough whenever it is quiet, continue steps 2-4 while making sure that it is quiet when you time the detection-to-arrival of the vehicles.
- If you heard or saw all the vehicles (including the worst cars) with enough warning to allow you time to cross, then you can conclude that under those conditions, it will be clear to cross whenever you hear or see no vehicles.
NOTE that this conclusion is true only under those conditions. If the visual or hearing conditions change, for example a large truck parks where it blocks the sound and view of the vehicles, or the roads were wet and they become dry, or if there is an extraneous sound that wasn't there when the TMAD was used, then the conclusion is no longer valid.
"WORST CARS"
- The "worst cars" are those vehicles that reach you in the shortest time once you detect them.
The "worst cars" are usually the ones that are most difficult to detect and reach you quickly.
We want to know whether even the "worst cars" can be detected with enough warning, so we continue to time our detection of approaching vehicles until
we feel confident that it is very unlikely that there will be any cars that can reach us in less time than those we've already observed.
Please note that these "worst cars" are NOT necessarily the fastest cars! In fact the research that Dr. Rob Wall Emerson and I did indicated that the speed of the vehicles had almost no relation to the length of time from when the vehicles were heard until they arrived (Wall Emerson, R. and Sauerburger, D. 2008). The very first time I used the TMAD (in January 1988), I heard the first car 10 seconds away, but among the next half dozen cars whose detection I timed, there were two cars that I could not hear until they were only 3 seconds away. One was very fast -- I heard it far away but it was going so fast that it arrived only seconds later. The other was going very slowly, almost coasting, so it was much quieter than the fast car. Because it was so quiet, I couldn't hear it until it was very close, but because it was going so slowly, it took a few seconds to reach me once I heard it -- the same time that it took the fast car to reach me once I heard it.
Meanwhile, this issue of observing / timing the "worst car" is an important one. Some people feel that because it is not possible to observe every vehicle that might ever pass in the future, we can never draw any conclusions about any situation (Bennett, 1991). This is even more of an issue nowadays than it was in 1991 because of electric and hybrid cars, although I have never noticed (nor did our research reveal) any problems with these cars at uncontrolled crossings -- see "Do quiet cars affect these crossings?"
Because of the concern Bennett raised about being sure to time one of the "worst cars," at the request of Dr. Everett ("Butch") Hill shortly before he died, Dr. Mary-Maureen Snook-Hill and the O&M Department at Peabody College studied this issue (Snook-Hill, M and Sauerburger, D. 1996). We found that we could be 95% sure of observing a "worst car" approaching from a given direction by observing at least 12 vehicles from that direction. The question that remains is whether 95% certainty is sufficient to draw any conclusions about whether the vehicles can be detected adequately and, if not, how much certainty is required.
We did a preliminary study as to whether any of us could learn to recognize a "worst car" when we observed it but didn't draw any conclusions. It was in my attempt to study this further that I discovered that in some places, cars that are detected at a distance can disappear and not be detected until they are much closer (see story). I have not studied it beyond this experiment, but this issue of the importance of "worst cars" when drawing conclusions, as well as our ability to recognize them, warrants further investigation. In the meantime, each person will have to consider it and make his or her best judgment when using the TMAD.
Bennett, Jane D. (1991). The fallacy of the timing methods. RE:view. Vol. 23, no. 2, 75-79.
Snook-Hill, Mary-Maureen and Sauerburger, Dona (1996). "Teaching students to assess safety for crossing streets which have no traffic control," in Proceedings of International Mobility Conference VIII, Tambartun National Resource Centre, Melhus, Norway, pp. 535-540
Wall Emerson, R, and Sauerburger, D. (2008). "Detecting approaching vehicles at streets with no traffic control." Journal of Visual Impairment and Blindness, AFB Press, Volume 102, Number 12, pp. 747-760
See Procedure to Develop Judgment of the Detection of Traffic for a usage of the TMAD
See Workshop for an example of the TMAD being used.
Self-Study Guide: what next?
If you are following the Self-Study Guide, you should return to finish reading Procedure to Develop Judgment of the Detection of Traffic.
Return to Procedure to Develop Judgment of the Detection of Traffic
Return to Self-Study Guide: Preparing Visually Impaired Students to Assess and Cross Streets With No Traffic Control
Return to home page