Conditions that Influence Drivers' Yielding Behavior in Turning Vehicles at Intersections with Traffic Signal Controls
Eugene A. Bourquin, Robert Wall Emerson, Dona Sauerburger, and Janet M. Barlow
Eugene A. Bourquin, Robert Wall Emerson, Dona Sauerburger, and Janet M. Barlow
A review of the available literature regarding right turn on green and pedestrian safety reveals sparse data. The topic is not a priority of transportation research, even though a 2009 journal article indicated that it has complex negative effects on pedestrians (Hubbard, Bullock, & Mannering), especially on those crossings from the corner nearest the turning vehicles. Right turn on green can create what traffic engineers call a vehicle-pedestrian conflict: both the right-turning vehicle approaching from behind and a crossing pedestrian can potentially enter the same space at the same time within a crosswalk. This situation causes significant risk to pedestrians (Preusser, Leaf, DeBartolo, & Blomberg, 1981). In a 2006 study by the University of Washington using National Highway Traffic Safety Administration data the researchers found that three times more pedestrians were hit by right-turning than left-turning vehicles, concluding that "vehicle movement was a significant predictor of severe injuries . . . and fatalities" (Roudsari, Kaufman, & Koepsell, p. 283). And in a 2005 dissertation study, more than 26% of motorists turning right with a green signal did not yield when a pedestrian was present (Karkee, 2005). Right turn on green and conflicts have not been addressed as a specific topic of interest in the orientation and mobility (O&M) literature. Since blind pedestrians often cross streets where right-turning vehicles are present at the near corner in the United States, and where left-turning vehicles are present in many other countries where drivers travel roadways on the left, we decided to study how pedestrians might influence drivers' yielding behaviors in such situations.
Before 2005, research studies in pedestrian-vehicle interactions were not found in the vision rehabilitation field, but rather within the domains of sociology, psychology, and engineering. Sociology researchers found that drivers yielded more readily to individuals perceived to be dependent: a mother with a carriage, people thought to have a physical disability, or people who were blind (Bake & Reitz; DeMarco, 1990; Harrell, 1992; Harrell, 1993; Harrell, 1994; Katz, Zaidel, & Elgrishi, 1975). In order for drivers to yield when necessary, pedestrians must be noticed. Cognitive psychologists have compiled a large corpus of study about the phenomenon of attentional capture and found that drivers and others responded with involuntary immediate visual focus (attention) when presented with items that they understood and that have meaning (Mack, Pappas, Silverman, & Gay, 2002; Most & Astur, 2007; Most, Simons, Scholl, Jimenez, Clifford, & Chabris, 2001).
We examined the research and major publications in O&M, finding an evolving perspective related to pedestrians who are blind and the relationship to vehicles at or approaching crosswalks. In the classic O&M publication from Hill and Ponder (1976), the authors recommended that a pedestrian who was blind not affect drivers in any way; they recommended that the cane be brought to midline near the body in a position that made it nearly invisible to drivers. Later, authors such as Jacobson (1993) and LaGrow and Weessies (1994) recognized that a visible cane and optional cane movements might alert drivers to an intention to step into the street and cross. The third edition of the Foundations of Orientation and Mobility was the first to address driver yielding (Barlow, Bentzen, Sauerburger, & Franck, 2010). The O&M profession has become actively engaged in drivers' yielding with the proliferation of roundabouts in the United States. Vehicle speeds, road geometry, and the position of the pedestrian at the curb has substantial influence on the drivers' willingness to yield to a pedestrian (Ashmead, Guth, Wall, Long, & Ponchillia, 2005; Geruschat & Hassan, 2005; Guth, Ashmead, Long, Wall, & Ponchillia, 2005).
All pedestrians who are about to cross a street, including those with visual impairments, need to assess their situation for risk and, in the process, determine the likelihood of a driver yielding. Based on the previous research findings in O&M and the psychosocial sciences, we hypothesized that both awareness of the pedestrian's visual impairment (indicated with a mobility cane) and the ability to communicate an intention to cross (by pedestrian actions) would be significant variables and result in substantial differences in drivers' delay and yielding when making right turns at green traffic signals.
Procedure
We conducted trials for the study at seven sites in four different areas of the United States. Sites were chosen for a great frequency of right-turning traffic but without a channelized turn lane or slip lane. At each site, a collaborating pedestrian used one of several prescribed methods (called conditions, and described below) to evaluate the effect of that method or action on yielding by the first vehicle driver. All collaborators were male and stood at least 5 foot 10 inches, wore dark, ordinary clothing such as jeans and jackets or sweaters, a baseball cap, and dark, wrap-around sun glasses. The study received approval from the Institutional Review Board of Western Michigan University.
The collaborating pedestrian (hereafter called the pedestrian) approached the crosswalk when the traffic signal was red for parallel traffic. The pedestrian was positioned to cross the street traveling counterclockwise at the intersection; therefore, vehicles which were stopped and intending to turn right were behind him and to his left. A trial commenced when there was a vehicle waiting to turn right in the nearest lane at the onset of the circular green traffic signal and there were no other pedestrians waiting at the crosswalk. The pedestrian initiated the appropriate condition at the onset of the walk signal or green traffic signal for the parallel traffic. Each trial ended 10 seconds after the traffic signal turned green when the pedestrian turned away from the crosswalk and left the corner.
The pedestrian stood in a location near the center of the crosswalk lines. This position was not always in the wheelchair ramp or on the detectable warnings (if such were present). In each trial, the pedestrian began the trial with the frontal plane of the body facing the far corner across the crosswalk. He did not make eye contact with the driver of the lead vehicle but began the trial with the head positioned such that he could see and monitor the signal being used in the study. This meant that the pedestrian's head was turned toward the WALK signal or, in the situation of a leading pedestrian interval (on Long Island and Asheville), toward the most convenient green traffic signal. Generally, the head and gaze were forward across the crosswalk. The head was maintained in this direction and may have moved only slightly when executing foot or cane movements. The pedestrian did not move his head left and right as if monitoring traffic so drivers would not perceive movement that they may have interpreted as informative.
Figure 1: From top left, clockwise, conditions: display, flagging, hand up, reversible step.
 Conditions
Conditions
NO-PEDESTRIAN condition: there was no pedestrian present at the time of the onset of the walk signal and circular green traffic signal.
CONTROL condition: the pedestrian's hands and arms were relaxed in their natural extended positions at the sides of the body, and he did not carry a cane.
In each of the following conditions, the pedestrian stood with a white mobility cane grasped on the grip with the right hand, with the tip of the cane placed near the curb, forward and slightly to the left of the pedestrian. The right arm was extended as far left as possible, in such a manner that the cane was easily visible to drivers to the left and behind the pedestrian. For all conditions, except the reversible step, the pedestrian did not move from his position until the trial terminated.
CANE DISPLAY condition: the pedestrian made no movement, and continued standing so that his cane was visible to the drivers.
CANE FLAG condition: the pedestrian swung the cane to the right affecting an arc that peaked approximately at waist level, then swung the cane to the left with a similar arc, and allowed the cane tip to rest in the street until the trial terminated.
REVERSIBLE STEP condition: the pedestrian took one step into the street with his left foot while simultaneously swinging the cane with a slightly elevated arc to the right and then left, allowing the cane to then rest in the street until the trial terminated.
HAND UP condition: the pedestrian extended the left arm to the left and slightly behind, with the fingers fully extended and palm facing the potentially turning driver in a posture indicating stop.
Recording data
A trial was recorded if the first vehicle was at or near the stop line in the near curb lane and turned right after the traffic signal turned green. An observing experimenter started a stopwatch at the onset of each trial, which was when the signal for parallel traffic changed to green. A lap timer was hit when the wheels of the first vehicle in line in the curb lane parallel to the pedestrian began rotating. This delay was recorded as the "start time" and was used as a measure of how long the driver waited before starting to turn. After the lap timer was hit to indicate the start of the vehicle's movement, the stopwatch continued running and the lap timer was hit again when the front bumper of that vehicle crossed the middle of the crosswalk. This was the "crosswalk time" and was used to indicate when there might have been a vehicle-pedestrian conflict if the pedestrian had been in the crosswalk. Ten seconds was selected as the maximum time for a trial for two reasons: 1) after this length of time a pedestrian who started crossing the street when the signal changed to green would be beyond the first lane so the potential vehicle-pedestrian conflict being studied would no longer be an issue; 2) if a driver was yielding, we did not wish to unduly impede traffic flow for a non-crossing pedestrian. Because this upper limit eliminated the potential for higher-value data points, the measures of when a vehicle began moving and when it eventually crossed the center of the crosswalk were not normally distributed. As such, non-parametric tests that rely on medians were used in analysis rather than tests that rely on means.
Results
Data were collected at seven sites around the United States: two in western North Carolina, Asheville and Hendersonville (in suburban Asheville); one on Long Island, New York; one in New York City; one in Bowie, Maryland (in suburban Washington, DC); one in Union City, California (suburban San Francisco); and one in Bellevue, Washington (near Seattle). Data were collected at each site for each of the five experimental conditions. See Table 1 for a summary of the sites.
| Table 1 | |||
| Number of trials for each site. | |||
| Site | Pedestrian | No pedestrian | |
| Asheville, North Carolina | 75 | 0 | |
| Hendersonville, North Carolina | 45 | 0 | |
| Long Island, New York | 45 | 9 | |
| New York City, New York | 46 | 9 | |
| Bowie, Maryland | 92 | 20 | |
| Union City, California | 45 | 9 | |
| Bellevue, Washington | 45 | 5 | |
| Total | 393 | 52 | |
| Notes: "Pedestrian" indicates when a collaborating pedestrian was standing at the corner; "No pedestrian" indicates when no pedestrian was present at the corner. | |||
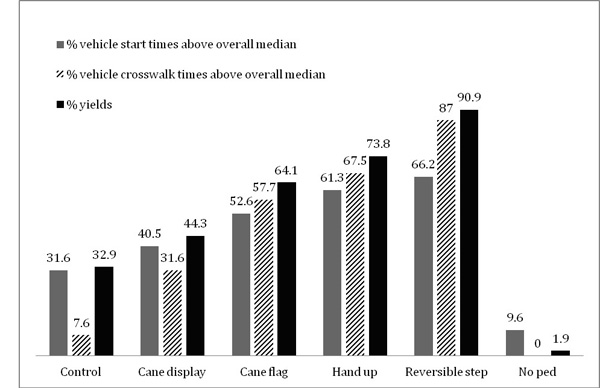
Table 2 and Figure 2 summarize the data for measures of when vehicles started moving (start time) and when vehicles reached the middle of the crosswalk (crosswalk time), broken down by experimental condition. Table 2 presents medians for the first two measures. We evaluated the differences of these measures across experimental conditions. Figure 2 and Table 2 indicate the direction of the differences. The greater the value (seconds) of start times and crosswalk times, the more desirable the response. (See Post hoc results, below, for a discussion of yielding data in Figure 2.)
Figure 2. Percent of trials, by condition, above median, and percent with a yield.
Click here for description of Figure 2.
| Table 2 | |||
| Median vehicle start and crosswalk times (seconds) with pedestrian present by condition. | |||
| Condition | Median start time (sec) | Median crosswalk time (sec) | |
| Control | .77 | 5.68 | |
| Cane display | 1.00 | 6.13 | |
| Cane flag | 2.17 | 9.16 | |
| Hand up | 4.98 | 10.00 | |
| Reversible step | 6.39 | 10.00 | |
| Notes. "Median start time" indicates the median seconds when a vehicle began to move after the green signal; "Median crosswalk time" indicates the median seconds when a vehicle crossed the middle of the crosswalk. | |||
For the crosswalk time, the cane display was not significantly different from the control condition, but cane flagging, reversible step, and hand up conditions were all significantly better than the control and the cane display condition. Reversible step was significantly better (i.e., longer time) than both cane flagging (Z = -5.19, p < .001) and hand up (Z = -3.20, p = .001), which were not different from each other (Z = -1.82, p = .07).
One reason why sites were chosen in different areas of the country was to allow an investigation into whether geography or intersection characteristics might impact yielding rates. Across 5 sites (Long Island, NY; NYC, NY; Bowie, MD; Union City, CA and Bellevue, WA), the median start time for a vehicle without a pedestrian present was 0 seconds and the median crosswalk time was 3.71 seconds. When a pedestrian was present (collapsed across all experimental conditions), the median start time ranged from 0 seconds in Bowie, MD to 7.45 seconds in Union City, CA. In looking at the potential impact of geography, the median crosswalk time ranged from 5.45 seconds in Bowie, MD to 10 seconds (the maximum) in Asheville, NC, Union city, CA, and Bellevue, WA. Kruskal-Wallis tests showed that there were significant differences across sites both start time (X2(6) = 120.10, p=< .001) and crosswalk time (X2(6) = 55.82, p=< .001).

Figure 3 shows, for each site, the percent of trials above the overall median when a pedestrian was present, for the vehicle start time and the crosswalk time. Each site was compared to the overall median across sites in order to determine whether any particular site offered greater percentage of higher or lower scores than other sites for each measure. NYC, NY and Bowie, MD had the lowest percent of trials over the overall median and NYC, NY had the lowest percent of yielding. There was a significant difference in yielding across sites (X2(6) = 71.24, p=< .001) with the highest rates of 90.7% and 86.7% seen in Asheville, NC and Bellevue, WA, respectively.
Figure 3. Percent of trials, for each site, over overall median with pedestrian present, and percent of yields
Click here for description of Figure 3.
Click here for description of Figure 3.

Another way of categorizing the sites was by their geometry. In broad terms, two sites (NYC, NY and Bowie, MD) had the pedestrian lined up to cross the stem of a T intersection, two sites (Asheville, NC and Bellevue, WA) had the pedestrian lined up to cross the top of a T intersection, and three sites (Hendersonville, NC, Long Island, NY, and Union City, CA) had the pedestrian crossing at a typical plus (four-leg) intersection. When the data were analyzed with the sites grouped in this way, there was a significant effect of geometry on start time (X2(2) = 101.29, p < .001) and crosswalk time (X2(2) = 66.51, p < .001). In conducting these Kruskal-Wallis tests, each of the 445 trials in the dataset was ranked according to their scores. The groups were compared based on the mean rank for each group. For the measure of when vehicles passed the middle of the crosswalk (crosswalk time), crossing the top of the T was the highest mean rank, crossing at a four-leg intersection was second, and crossing the stem of a T intersection was lowest (see Figure 4).
Figure 4. Proportion of trials above the overall median and yielding rate broken down by intersection geometry
Click here for description of Figure 4.
Click here for description of Figure 4.
Post hoc results
We initially completed our assessment of the data by examining the median drivers' response times to each of the conditions. However, we decided to also consider and affirm our findings by categorizing a driver's right turn on green behavior in terms of delays and yields. It was not obvious whether a driver turning right who paused for a given length of time was delaying movement for the pedestrian or pausing for some other reason, and so we decided a specified length of time would be useful. We collected further data at five of the 7 sites (see Table 1) regarding the behavior of right-turning drivers at the intersections when no pedestrians were present, and defined a yield as a crosswalk time which exceeded 2 standard deviations above the average for the no-pedestrian trials. This provided a high degree of certainty that the drivers' behaviors were in response to the presence and behavior of a pedestrian. For the two sites where data were not gathered in the no-pedestrian conditions, the mean of all the no-pedestrian trials from all of the other sites was used (see Table 3). See Figures 2 and 3 for a summary of the yielding results.
| Table 3 | |||
| Mean vehicle cross crosswalk with no pedestrian present | |||
| Site | Mean time until vehicle crossed crosswalk | Standard Deviation for no ped trials | |
| Asheville, NC | no data | no data | |
| Hendersonville, NC | no data | no data | |
| Long Island, NY | 4.77 | 1.89 | |
| New York City, NY | 4.92 | 1.30 | |
| Bowie, MD | 3.24 | 1.05 | |
| Union City, CA | 3.25 | 1.59 | |
| Bellevue, WA | 4.52 | .68 | |
| Overall | 3.92 | 1.51 | |
| Notes. "No ped" indicates when no pedestrian was present at the corner. | |||
The urban sites (NYC and Asheville) showed significantly longer waiting times (start time and crosswalk time) than the suburban sites. While the yielding data showed a similar trend, the difference was not significant (Z = 3.30, p = .07). The urban sites had a 67.8 % yielding rate and the suburban sites had a 58.1 % yielding rate.
Discussion and Conclusions
The results of this study confirm that pedestrian visibility and communication of an intention to cross have an effect on drivers' delay and yielding when turning right at the onset of the circular green traffic signal. Examination of percent of trials above the median time (seconds) and the percent of trials that were yields (Figure 2), indicates a pattern of congruence across all conditions.
In contemporary environments, with complex intersection geometry and quiet vehicles on the roads, it is essential to identify strategies that improve rates of yielding. The most important outcomes of the experiment are related to drivers' responses to various conditions as they turned across the crosswalk where they might share that space with a pedestrian. Simply stated, taking a step into the street caused high driver yielding, as did putting a hand up to indicate stop; however simply displaying or flagging the cane were statistically not as effective. Although interpretation of results that are not statistically significant must be considered with caution, these results taken in context of numerous previous studies (Harrell, 1992; Harrell, 1993; Harrell 1994; Inman, Davis, & Sauerburger, 2006; Geruschat & Hassan, 2005) indicate there is a consistent hierarchy of effect; these driver behaviors have been observed at roundabouts, uncontrolled crosswalks and, as in this study, with turning vehicles at a traffic controlled intersection. The display of a mobility cane garners a modest increase in drivers' yielding, adding movement creates some greater yielding, and assertive behavior that shows an intent to cross causes a significant and practical effect.
In order for drivers to behave appropriately, that is, yield to a pedestrian who is blind wishing to cross the street, two conditions must be met: drivers must notice the pedestrian, and in the case of a blind pedestrian, his or her cane; and drivers must understand the intent of the pedestrian to initiate a crossing. Bourquin, Wall Emerson, and Sauerburger (2011) discussed the human visual system and psychology of drivers. Drivers selectively notice people and objects in their visual panorama, and respond when certain conditions prevail. Visual cues must have relevance and meaning (Mack, Pappas, Silverman, & Gay, 2002) for the driver, and a mobility cane was shown to be such a cue in previous studies (Bourquin, Wall Emerson, & Sauerburger, 2011; Geruschat and Hassan). In psychological terms, " . . . experiments indicated that whether an object gains value-based salience and consequently captures attention depends crucially on the object's perceptual salience, relative to its environment or context, and on the nature of the value" (Wang, Yu, & Zhou, 2013, p. 11). As well, sudden onset of movement is known to trigger attention (Kawahara, Yanase, & Kitazaki, 2012). Importantly, however, conspicuity is apparently not sufficient to cause higher rates of yielding behavior. As indicated by the ranking of behaviors in this study causing yielding (from least to most: display, signals such as the hand and cane movement, stepping into the street), once a driver attends to and recognizes a pedestrian who is blind, and the less ambiguous the pedestrian's behavior is at showing his or her intent, the more drivers will give way.
Considering these results, and recognizing a hierarchy of effects upon drivers from various pedestrian behaviors, the following have specific implications for practice:
- 1. The prominent display of the mobility cane was not statistically significantly different than a typical pedestrian standing at the corner without a cane. The effect on drivers right turn on green yielding was an increase from about 33% to 44%. Orientation and Mobility specialists may need to re-examine the assumption, commonly recommended in the recent literature, that displaying the cane will be sufficient to warn drivers of the presence of a pedestrian who is blind or visually impaired, indicate the pedestrian's intent, and result in drivers yielding when making a right turn on a green signal.
2. Cane flagging and using a hand up to tell the drivers to stop were moderately effective techniques for influencing the drivers, but a reversible step into the street was significantly better than any other condition. The reversible step increased drivers' yielding by 275% over a pedestrian standing at the corner without a cane, and 205% greater yielding than a pedestrian displaying a cane. When possible, O&M specialists may wish to develop techniques that preserve pedestrian safety but allow for a clear movement into the street.
Indeed, we did detect a significant difference that appeared to be caused by the geometry of the intersection (see Figure 4). At T-intersections, where drivers were turning right from a major road onto a minor road, or the opposite, drivers' yielding was different than at plus intersections. Drivers also responded differently when they were turning from the stem than when turning from the top of the T. We speculate that when drivers are leaving the major road (the top, wider and generally faster traffic) they are less likely to yield than when leaving the minor road (the stem, narrower and generally slower traffic).
We also examined the data for any significant correlations between the curb radii and crosswalk time. Although curb radius is considered an engineering factor that can control drivers speed when turning (Wiener, Welsh, & Blasch, 2010), we found no relationships between curb configuration and drivers' responses for yielding when making right turns at a green traffic signal.
Finally, two variables not included in our study merit mention. Previous research indicated that the presence of a dog guide garnered less yielding than a mobility cane (Guth et al., 2005). It may be that a modification of the hand-up technique would be effective for dog guide users. The other variable is head position and movement. In our study the collaborating pedestrian did not appear to look at drivers. Some pedestrian advocates and experts contend that "eye contact" can increase the likelihood that turning drivers will yield to the pedestrian (De Kirby, 2013; Walk Safe, Stay Alert, n.d.); meanwhile, some empirical research has found the opposite. Katz and Elgrishi (1975) reported that drivers slowed down or stopped more often for crossing pedestrians when the pedestrians did not look at the approaching vehicle.
Strengths and Limitations
We attempted to define drivers' behaviors in terms of two measures: the percent of delays above the median, and a yield defined as a delay greater that a standard above waiting time when no pedestrians were at the crosswalk. Both of these are constructs and neither constituted an actual yield to a crossing pedestrian.
We also note that the pedestrian in these trials knew precisely when the signal changed, which may not be possible for pedestrians who are blind in the absence of an accessible pedestrian signal. Taking a low-risk step into the street or presenting an open hand to the drivers may have different effects if the pedestrian does not initiate the behavior immediately when the signal changes in his or her favor.
These research findings add to a growing literature in driver yielding behavior. Understanding those factors which can be under the control of blind and visually impaired travelers and which can substantially and practically change the risks while crossing streets has the potential for enhancing teaching strategies. The findings, along with others, provide basic principles for increasing safety at crosswalks. Specific techniques should be explored and applied to match the potential of individual travelers.
References
Eugene A. Bourquin, DHA, senior instructor, Helen Keller National Center for Deaf-Blind Youths and Adults, 315 Eighth Avenue, 10E, New York, NY 10001
Robert Wall Emerson, Ph.D., professor, Department of Blindness and Low Vision Studies, Western Michigan University, 1903 West Michigan Avenue, Kalamazoo, MI 49008-5218
Dona Sauerburger, M.A., orientation and mobility specialist, 1606 Huntcliff Way, Gambrills, MD 21054
Janet M. Barlow, M.Ed., president, Barlow Design, Accessible Design for the Blind, 3 Manila Street, Asheville, NC 28806
Return to home page