Site 1 was a T-shaped intersection, with each approach along the main street to the crossing point being straight and clear of obstructions for approximately 1,000 feet. On half the trials at this site, the experimenters blocked sound on one side of the participants with an 8-foot-wide and 5-foot-high barrier that simulated a parked vehicle blocking the sound of oncoming vehicles.
Site 1 was a T-shaped intersection, with each approach along the main street to the crossing point being straight and clear of obstructions for approximately 1,000 feet. On half the trials at this site, the experimenters blocked sound on one side of the participants with an 8-foot-wide and 5-foot-high barrier that simulated a parked vehicle blocking the sound of oncoming vehicles.

 Site 2 was a 90-degree square intersection; approximately 150 feet to the right of the crossing point, the main street had a severe bend in the roadway, beyond which the approaching vehicles could not be seen, and approximately 100 feet to the left was a minor bend that was more gradual (approaching vehicles could be seen approximately 200 feet away).
Site 2 was a 90-degree square intersection; approximately 150 feet to the right of the crossing point, the main street had a severe bend in the roadway, beyond which the approaching vehicles could not be seen, and approximately 100 feet to the left was a minor bend that was more gradual (approaching vehicles could be seen approximately 200 feet away).

 Site 3 was a T-shaped intersection with a steep hill that dropped away from the crossing point starting at approximately 50 feet to the right and a heavily treed area that obscured oncoming traffic beyond approximately 100 feet to the left.
Site 3 was a T-shaped intersection with a steep hill that dropped away from the crossing point starting at approximately 50 feet to the right and a heavily treed area that obscured oncoming traffic beyond approximately 100 feet to the left.
|
Listening conditions |
Total trials |
Range of detection time (in seconds) |
Average (SD in parenthesis) detection time (in
seconds) |
Average (SD in parenthesis) safety margin (in
seconds) |
Median safety margin (in seconds) |
|
Straight |
144 |
7-35 |
13.79 (4.67) |
6.79 (4.67) |
6.00 |
|
Baffle |
50 |
5-32 |
13.34 (5.73) |
6.34 (5.73) |
5.00 |
|
Severe bend |
60 |
4-19 |
7.62 (3.11) |
0.62 (3.11) |
0.00 |
|
Minor bend |
39 |
4-28 |
11.08 (4.93) |
4.08 (4.93) |
3.00 |
|
Hill |
43 |
4-20 |
9.51 (3.56) |
2.51 (3.56) |
3.00 |
|
Treed approach |
24 |
7-26 |
11.25 (4.40) |
4.25 (4.40) |
3.50 |
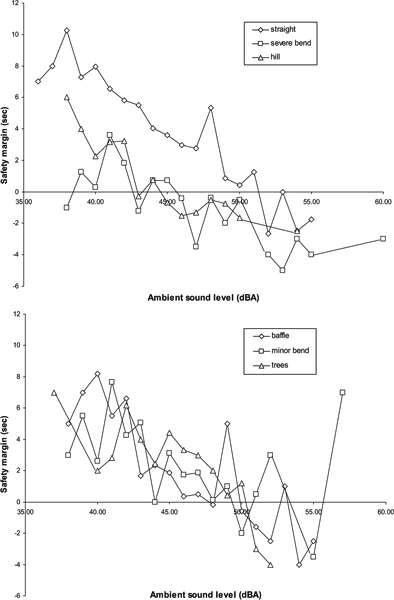 The differences between environmental conditions are exemplified by looking at average safety margins for the ambient sound level in each environmental condition (see Figure 1). Two panels are used in the figure to reduce visual clutter for the reader. In the lower panel, the baffle, minor bend, and treed conditions show similar patterns of decreasing safety margins as the ambient sound level increases. At about 50 dBA, the average safety margin becomes low enough to cause concern about detectability. The upper panel shows that the average safety margin in the straight condition consistently remains positive up to about 52 dBA. However, detection at the severe bend and hill conditions degrades at much lower sound levels. The severe bend showed an average negative safety margin at 38 dBA, while the hill began showing negative average safety margins as low as 43 dBA.
The differences between environmental conditions are exemplified by looking at average safety margins for the ambient sound level in each environmental condition (see Figure 1). Two panels are used in the figure to reduce visual clutter for the reader. In the lower panel, the baffle, minor bend, and treed conditions show similar patterns of decreasing safety margins as the ambient sound level increases. At about 50 dBA, the average safety margin becomes low enough to cause concern about detectability. The upper panel shows that the average safety margin in the straight condition consistently remains positive up to about 52 dBA. However, detection at the severe bend and hill conditions degrades at much lower sound levels. The severe bend showed an average negative safety margin at 38 dBA, while the hill began showing negative average safety margins as low as 43 dBA.
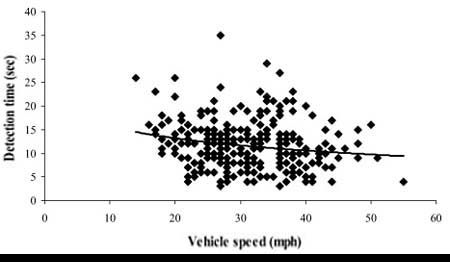
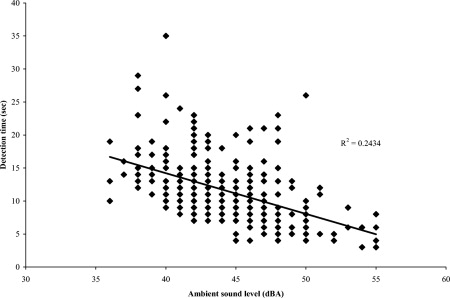 We analyzed the effect of ambient sound level, vehicle sound level, and vehicle speed on detection time more closely. To do so, we used only the data from the straight roadway (without the baffle). This environmental condition had no obstructions to hearing in either direction and so allowed for a clear analysis of the relative effects of ambient sound level, vehicle sound level, and vehicle speed on the detection of oncoming vehicles. These 288 trials showed a strong negative relationship between ambient sound level and detection time (see Figure 2).
We analyzed the effect of ambient sound level, vehicle sound level, and vehicle speed on detection time more closely. To do so, we used only the data from the straight roadway (without the baffle). This environmental condition had no obstructions to hearing in either direction and so allowed for a clear analysis of the relative effects of ambient sound level, vehicle sound level, and vehicle speed on the detection of oncoming vehicles. These 288 trials showed a strong negative relationship between ambient sound level and detection time (see Figure 2).